
Governor apparatus
Description
Universal Governor Apparatus is designed to study the working of different governors normally used to control the speed. It consists of a main spindle, mounted vertically on the base plate. This spindle is driven by a variable speed Motor which is also mounted vertically on the same base plate. Any one governor assembly out of four can be mounted on spindle. The spindle speed is controlled by speed control unit. A graduated scale is fitted to the sleeve to measure the displacement.

Motorized Gyroscope
Description
The set up consists of stainless steel disc mounted on a horizontal shaft, rotated by a variable speed motor. The rotor shaft is coupled to a motor mounted on a trunion frame having bearings in a yoke frame, which is free to rotate about vertical axis. A weight pan on other side of disc balances the weight of motor. Rotor disc can be move about three axis. Torque can be applied by calculating the weight and distance of weight from the centre of rotor.

Universal Vibration Apparatus
Description
Universal Vibration Apparatus that provides comprehensive unit to perform the vibration experiments. A universal frame is provided upon which quick and easy assembly of various experiments can be done. The unit is self-contained to safely store spares. The students can easily assemble the experiments and study the theory of vibrations practically. We are the prominent producer of efficient and powerful Universal Vibration Apparatus which meet international standard.
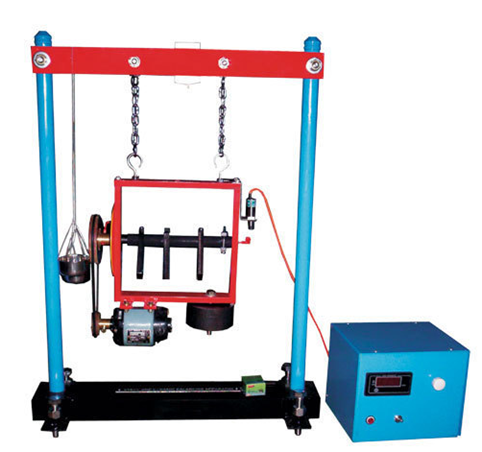
STATIC DYNAMIC BALANCING APPARATUS
Description
This equipment is designed for carrying out the experiment for balancing a rotation mass system. The apparatus consists ofa stainless steel shaft fixed in a rectangular frame. A set of four blocks with a clamping arrangement is provided. For static balancing, each block is individually clamped on shaft and its relative weight is found out using cord and container system in terms of number of steel balls. For dynamic balancing, a moment polygon is drawn using relative weights and angular and axial position of blocks is determined. The block are clamped on shaft is rotated by a motor to check dynamic balance of the system. The system is provided with angular and longitudinal scales and is suspended with chains for dynamic balancing.